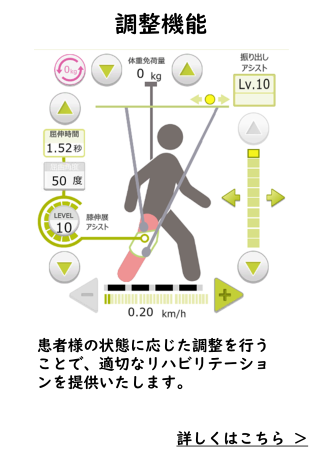
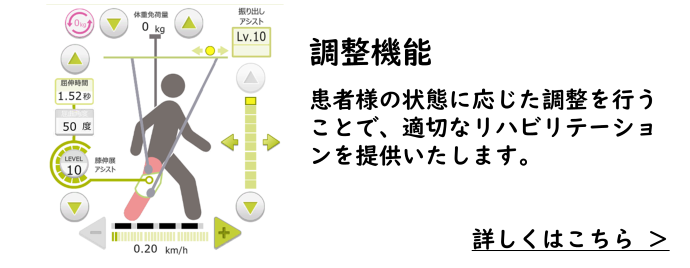
特徴


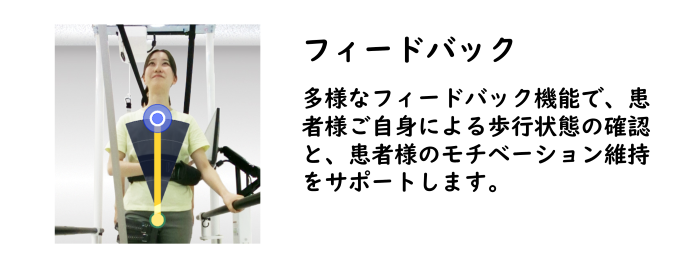
多様なフィードバック機能で、患者様ご自身による歩行状態の確認と、患者様のモチベーション維持をサポートします。
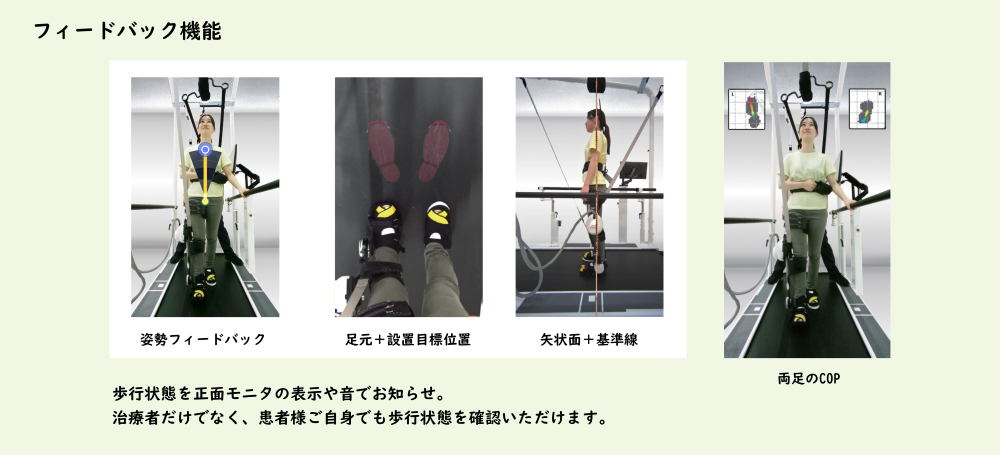

視覚によるフィードバック
フィードバック映像を正面モニタに表示することで、歩行状態を視覚的に確認できます。
- カメラ映像
- 前額面、足元、矢状面の3方向の映像から
選択し、表示することが可能です。
- COP表示
- 荷重分布センサの出力から計算した
左右足のCOPをリアルタイムで表示します。
- 接地目標位置
- 足元の映像において、
着地目標を確認しながら練習できます。
- 基準線
- 基準線を表示することで、
目標の姿勢を意識した練習ができます。
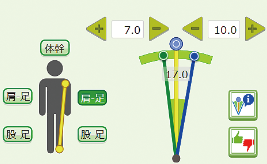
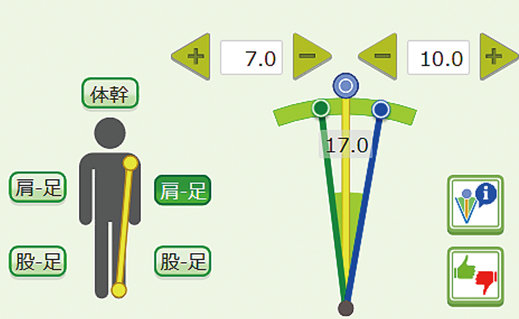
- 姿勢
フィードバック - 5種類の軸を表示することで、
目標の姿勢をより意識した練習ができます。
- その他の視覚
フィードバック -
- 歩行情報(歩行距離・歩行時間など)
- 荷重グラフ(荷重量変化の棒グラフ)
聴覚によるフィードバック
目標値を設定したうえで、歩行状態を音で患者様にお知らせします。
荷重目標値左右脚の荷重目標値を設定できます。

膝屈曲角度立脚時の膝折れ判定角度を
設定できます。

メトロノーム機能目安となる歩行リズムを
意識した練習ができます。

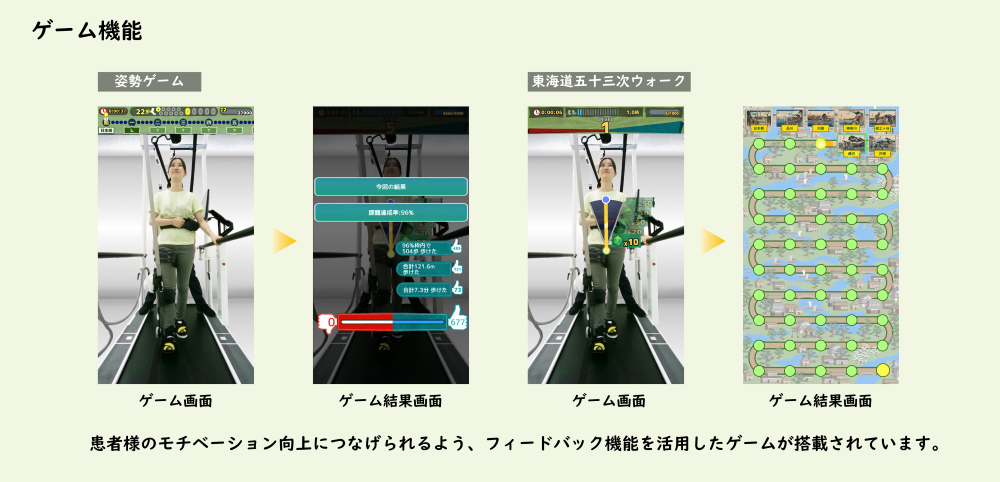
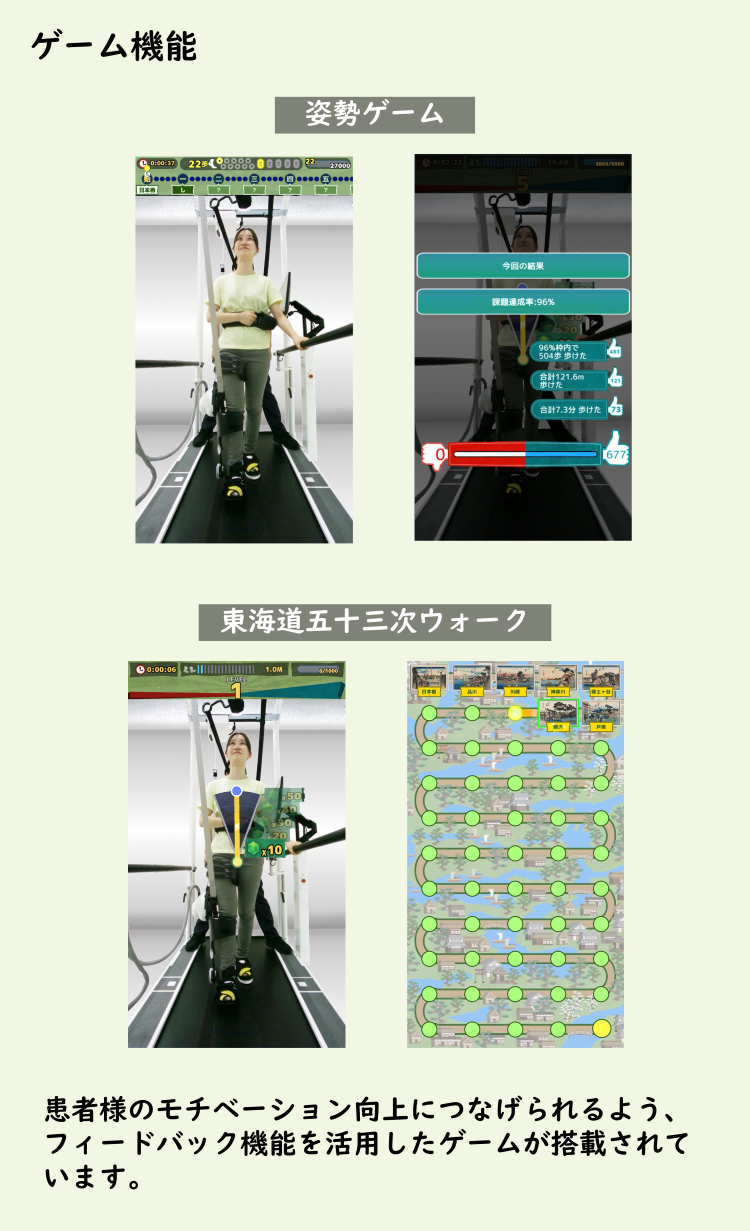
姿勢ゲーム
姿勢フィードバック機能を活用し、姿勢の維持に応じてポイントを獲得するゲームです。
調整した軸の範囲内で姿勢を維持すると、ポイントを獲得でき、範囲から外れるとポイントがリセットされる仕組みです。
- 難易度調整が可能
- 軸の振れ幅の許容範囲を調整することで適切な難易度に設定できます。
- レベルアップによる動機付け
- 獲得したポイントに応じてレベルアップし、モチベーション向上につなげます。
東海道五十三次ウォーク
リハビリテーション中の歩数をカウントし、東海道五十三次の宿場を旅するゲームです。
このゲームを行うことにより、多数歩練習を促します。
- データにもとづいた歩数設定
- ウェルウォーク利用者が入院から退院までに歩いた歩数データをもとに、最後の宿場までたどり着きやすい歩数に設定しています。
- コレクションで動機付け
- 宿場にたどり着くという目標設定をすることによって、モチベーション向上につなげます。





- 写真は実際の色と異なって見える場合があります。
- 掲載の画像・イラストはイメージです。